发布日期: 2024-11-27 作者:工程机械学院 点击:[401]
机器人领域国际顶级会议2024 lEEE/RSJ 智能机器人与系统国际会议(2024 International Conference on Intelligent Robots and Systems (lROS)) 于2024年6月30日收录我院2020级直博生李茹月的学术成果“四足机器人的主动灵巧仿生躯干”(An Active and Dexterous Bionic Torso for a Quadruped Robot)。李茹月为论文第一作者,我院朱雅光教授为通讯作者,长安大学为第一署名单位。2024 IEEE/RSJ智能机器人与系统国际会议(IROS 2024)已于2024年10月14日至18日在阿联酋阿布扎比的ADNEC成功举办,我院博士生李茹月在会议上分享了自己的研究成果并做学术报告。IEEE/RSJ智能机器人与系统国际会议(IROS)是全球最大、最具影响力的机器人研究会议之一。IROS成立于1988年,每年举办一次,为国际机器人研究界提供一个国际论坛,探讨智能机器人和智能机器的科学和技术前沿。IROS由IEEE机器人与自动化学会、日本机器人学会、仪器与控制工程师学会、新技术基金会和IEEE工业电子学会赞助。

图1 学术报告现场
躯干作为动物身体不可或缺的部分,除了为身体提供支撑以外还能展现出多种灵活的运动,目前应用广泛的四足机器人多为刚性躯干,相较四足动物而言这种机器人缺乏结构灵活性和运动多样性。因此,为了使四足机器人具备生物躯干灵活运动的功能,本文基于生物躯干的形态结构和运动原理设计了一个用于四足机器人的主动灵巧仿生躯干,模拟了四足动物的脊柱以及相关肌肉结构,可以实现动物躯干包括弯曲、伸展、侧弯和轴向旋转在内的多种运动,分析了躯干的运动学、工作空间、结构动力学、负载能力以及灵巧性能,还加入了被动弹簧模拟椎间盘的减震和承载。此外,创新的仿生躯干在四足机器人上得到应用,并验证了躯干的灵活性和应用于足式机器人的有效性,为仿生四足机器人的创新发展提供了新的研究思路。
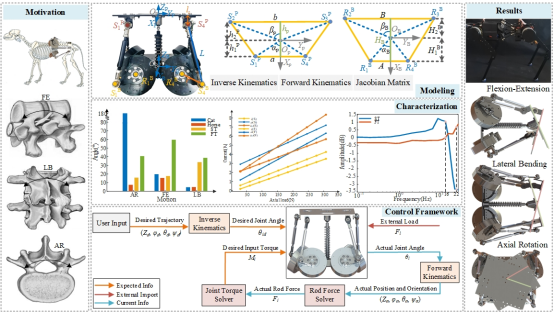
图2 论文图形摘要
(审核:范婷 责任编辑:赵尉尉)




