发布日期: 2022-06-29 作者:工程机械学院 点击:[1111]
近日,控制论领域国际顶级期刊《IEEE控制论学报》(IEEE Transactions on Cybernetics)正式刊登我院朱雅光教授学术成果“振荡器波形调节和同步的通用机制:机器人行为多样性生成应用”(Generic Mechanism for Waveform Regulation and Synchronization of Oscillators: An Application for Robot Behavior Diversity Generation)。《IEEE控制论学报》创刊于1960年,主要报道计算智能、机器学习、机器人技术等领域的最新研究进展及其在控制论领域的推广研究,当前影响因子为19.118,在全世界控制论领域具有广泛影响力。朱雅光教授为论文第一作者和通讯作者,长安大学为第一署名单位,南丹麦大学Poramate Manoonpong教授为合作作者。
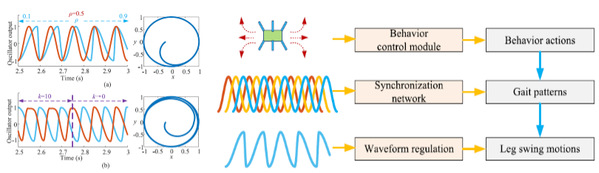
非线性振荡器广泛应用于仿生机器人运动网络中,准确、稳定、可控的振荡信号是行为控制的基础,主要以产生用于机器人运动控制的基本节律信号,但在不改变振荡器特性的情况下,特别是在网络同步过程中对信号波形进行整形和调节的方法至今没有得到充分研究。因此,为了详细说明非线性振荡器波形调节的原理和过程,确保其影响可控,文章提出了一种波形调节和同步方法,并分析了不同初始条件、网络参数、相位和波形调节等因素下的同步偏差。基于所提出的方法构建了用于仿生机器人的三层行为控制架构,实现机器人的多样化行为。而一系列实验结果表明了该方法在其他常用的非线性振荡器和神经振荡器中同样有效,并且在信号控制精度、行为模式等方面表现良好,极大的提升了仿生机器人运动过渡的稳定性和平滑性。此外,该类非线性振荡器也广泛应用于多自由度协同、群体智能、异步信号耦合同步等研究,可扩展应用于工程装备和机器人中的人机协同、多机协同等领域,具有重要的理论和应用价值。
(审核:李勉 责任编辑:冯延清)




